航天技术是一个国家科技水平和综合国力的重要体现,经过60多年的发展,中国航天已经步入世界航天大国行列,“长征”系列运载火箭累计成功发射了350余次,并且18/19连续2年宇航发射数量位居世界第一,今年位居第二。回顾中国航天的发展历程,中国运载火箭实现了从无到有、从有到全、从低轨到高轨,从发射卫星到发射空间站的不断跨越。
从20世纪70年代开始,长征一号(CZ-1)、长征二号(CZ-2)运载火箭的发射成功,解决了我国运载火箭的有无问题;90年代长征二号捆绑(CZ2E)火箭成功发射外国卫星,中国航天商业发射走向世界;载人航天运载火箭长征二号F,已取得了“14战14捷”的骄人战绩,将11名宇航员14人次送入太空;进入21世纪以来,长征五号(CZ-5)、长征七号等新一代运载火箭陆续首飞,中国航天全域轨道发射能力达到国际先进水平,长征十一号(CZ-11)固体运载火箭商业化发展趋势明显,快速、便捷、灵活、发射成本低等特点支撑了多样化发射需求。
随着中国航天强国建设的步伐加快,重型运载火箭(CZ-9)处于关深阶段,重复使用火箭进入工程研制,高可靠和智能化将成为未来火箭的发展方向。图 1 我国运载火箭制导控制技术发展历程(2)智能控制技术是提升空间飞行器可靠性的有效途径1970年,中国航天采用单轴自旋稳定控制技术成功发射东方红一号卫星,标志着我国正式开启太空时代,1997年,东方红三号卫星控制系统首次采用全三轴稳定技术,显著提升了卫星在轨寿命和运行可靠性,2011年,神州八号载人飞船与天宫一号成功实施中国首次空间交会对接,标志着我国成为世界上第三个独立掌握空间合作目标自主交会技术的国家,2013年,中国航天将自主悬停避障技术成功应用于“嫦娥三号”着陆器,实现中国首次对地外天体的直接探测,近年来,中国航天突破了卫星群状态智能感知、智能规划、自主协同控制等关键技术,未来将逐步建设可在轨服务与维护、升级拓展、星群编队的空间系统。我国空间飞行器逐步从科研试验转向业务应用,特别是在近地到深空、在轨服务与维护、大规模卫星星座等方面快速发展,空间飞行器制导控制技术将从传统控制逐步向智能控制升级更新,亟需航天智能控制技术来提升空间飞行器的可靠性和自主运维能力。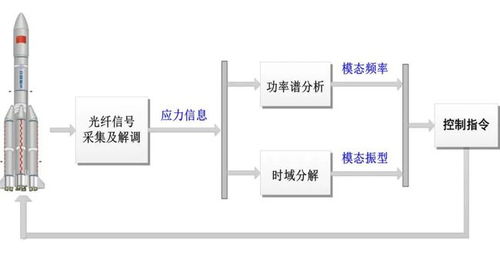
我国空间飞行器制导控制技术发展历程,如图2所示。
表 1 智能控制技术在航天重大科技工程中的应用航天智能控制从“会学习”的火箭做起“会学习”运载火箭制导控制技术就是将智能技术引入导航、制导及控制等各个环节,使运载火箭变得更自主、更可靠、更聪明,通过学习和训练,弥补程序化控制策略带来的局限性,增强运载火箭适应复杂飞行环境及应对突发事件的能力,提高航天发射任务的可靠性。“会学习”的火箭作为未来亟需的研究对象需要航天智能控制技术的支撑,围绕飞行状态在线辨识与感知、制导控制在线重构、经验知识自学习、自主适应与进化、箭上强计算五大能力需求[3],不断提升“会学习”火箭的可靠性和性能指标。0航天智能控制技术的发展阶段航天智能控制技术发展可以简单划分为4个阶段:第一阶段具备适应能力,实现控制系统关键环节的智能化;第二阶段具备学习能力,实现学习先进、跟随模仿;第三阶段具备想象能力,实现举一反超越常识认知;第四阶段具备演化能力,实现发现问题、解决问题。
航天智能控制技术也可概括为如图3所示两个阶段:“+智能”——将人工智能控制技术应用于控制系统,实现工程性融合;“智能+”——将智能技术与控制技术深度融合,使火箭控制系统颠覆性演进,实现颠覆性演进。图 4 “会学习”的运载火箭两个特征0“边飞边学”制导控制技术研究与应用“边飞边学”制导控制技术依靠箭上强大计算能力,充分利用箭载多源信息,针对动力系统典型故障实现在线实时辨识,运载及控制能力在线评估,轨迹在线规划、控制参数在线优化等能力。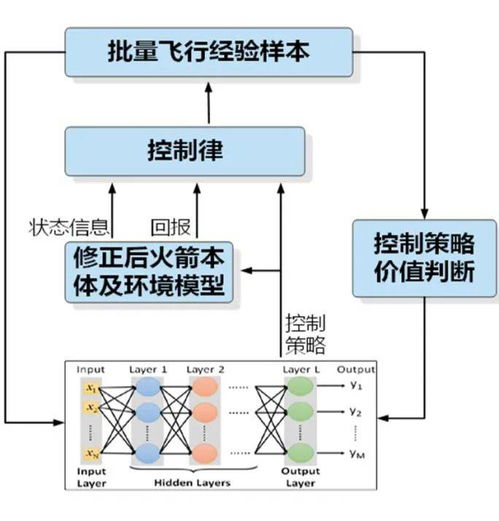
基于运载火箭的“边飞边学”特征,开展了如下制导控制技术探索与应用,具体如图5所示。
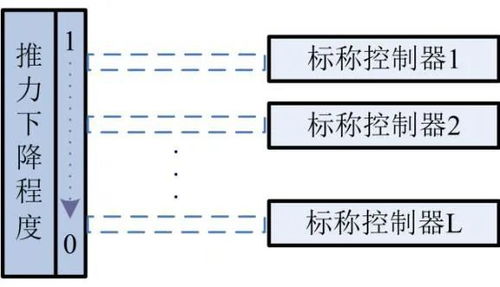
图 6 发动机故障辨识与制导控制重构技术总体研究思路1)主发动机推力下降故障辨识技术针对运载火箭主发动机一度故障模式,采用三通道信息融合的方法对发动机推力进行辨识。基于惯组敏感的箭体系视加速度和角速度信息,以及伺服摆角指令,利用扩张状态观测器估计得到角加速度,通过含遗忘因子的最小二乘算法对发动机的推力进行辨识,实现主发动机推力下降辨识,辨识技术如图7所示。图 8 控制重构参数自适应切换示意图针对运载火箭主发动机、姿控喷管、末修发动机三类典型动力系统故障模式,突破了基于运动信息、图像信息的动力学系统故障在线辨识关键技术,突破了飞行能力在线飞行能力在线评估、非致命故障在线重构的制导控制技术,其中姿控喷管极性及常开/常闭故障辨识技术、姿控喷管极性故障控制重构技术已闭环应用于CZ-3Y63飞行试验,得到了工程验证。
(2)基于光纤光栅的运载火箭弹性模态识别——学会建模调参运载火箭的弹性模态数据是进行姿态稳定设计的必要输入,一般由地面大型弹性模态试验获得,试验周期长、成本高,且有可能存在天地不一致的情况。若采用光栅光纤传感器,当火箭本体形变发生变化,通过光的折射率变化转换到形变量计算,在线感知本体的模态变化,并将辨识结果引入到控制方程中,通过在线优化技术实现控制指令修正,将提升控制系统的适应复杂飞行环境的可靠性,减少控制系统对模型的依赖。飞行器弹性模态在线识别与控制方案,如图9所示。图 10 芯一级主发动机发生严重推力下降故障后的轨迹规划图围绕三类轨迹规划问题:火箭故障后能力评估与轨迹规划、火箭变目标轨迹规划、火箭垂直回收轨迹规划,突破了基于凸优化的在线能力评估与规划技术、基于凸优化和多项式的运载火箭垂直回收轨迹规划技术,基于演示验证平台,完成了飞行试验,以CZ-5为模型,完成了不同飞行阶段故障后轨迹重构的仿真验证。
(4)基于稳定裕度在线辨识的参数重构控制技术——学会自优化在运载火箭助推段飞行段,质心变化、推力变化、不确定性气动环境变化均会对控制系统稳定裕度带来影响,通过对闭环系统施加最优多正弦激励信号,在线观测输入输出数据并求取系统稳定裕度,并建立控制参数与稳定裕度的映射关系,制定调参策略,从而提高火箭对本体不确定性的适应能力。其中,通过采用频域辨识方法求解系统的频率特性函数,表现在Bode图上,进而得到系统的稳定裕度。基于稳定裕度在线辨识的原理如图11所示。图 12 硬件平台整机架构0“终身学习”控制系统的研究与应用“终身学习”的控制系统以控制系统全生命周期数据为基础,通过对试验数据的管理与梳理,挖掘其中内在关联信息,通过持续训练与优化,改进运载火箭的控制系统架构、控制方案和参数等,实现控制系统与智能技术的深度融合,具备自认知、自学习、自演化的能力特征,如图13所示。
基于运载火箭的“终身学习”特征,开展了相关的探索与应用。图 14 基于关联规则算法的数据管理与挖掘技术(2)基于全生命周期数据的控制系统自我学习技术——终身学习基于全生命周期数据,对运载火箭飞行环境、飞行任务和火箭本体进行自认知,基于修正模型和经验样本进行控制系统自学习,通过利用全生命周期数据减少对模型的依赖,并逐步升级为无模型自适应控制。通过数据的挖掘与认知,将全生命周期数据转化为经验化数据池,依次进行经验归纳与提炼、经验样本泛化,最终形成批量经验样本,实现对系统模型的学习。通过采用神经网络、数据驱动、深度学习等算法,对控制律进行学习,实现控制系统的自我学习。
“终身学习”的控制系统自我学习方案如图15所示,以飞行器的质心运动和绕心运动的数据为基础,完成基于数据驱动的控制律在线学习。图16 基于自学习自演化的控制系统持续优化方案总结本文梳理了我国运载火箭的发展历程,分析并指出航天器是自主系统,且可靠性要求高,航天器未来的发展对高可靠性需求迫切,提出了航天智能技术从航天器的可靠性做起。并通过梳理控制科学的发展路线,重点强调了智能控制技术是控制系统的发展趋势,是提升航天器可靠性的有效途径,支撑了航天重大科技工程的实践,提出了航天器的可靠性从航天智能控制做起。
总结了“会学习”运载火箭的五大需求和两大特征的内涵,进一步探索了“会学习”运载火箭的智能制导控制技术的发展方向,重点围绕非致命故障辨识与制导控制重构、基于光纤光栅的运载火箭弹性模态识别、轨迹在线规划、基于稳定裕度在线辨识的参数重构控制、分布式多元异构智能计算、基于关联规则算法的数据管理与挖掘、基于全生命周期数据的控制系统自我学习、基于自学习的控制系统持续优化8个方面进行展开介绍,提出航天智能控制从“会学习”的火箭做起。